
Go to
Self-Assembly
A Methodology for Controlling and Exploiting Self-Assembly Across Length-Scales
Overview:
Self-organization is one of the scalable and extremely robust key mechanisms for coordinating multi-unit systems at all scales. Self-organization relies essentially on four ingredients: positive feedback, negative feedback, multiple interactions, and randomness. Positive feedback is usually represented by nonlinear amplification mechanisms which trigger the emergence of a spatiotemporal organization. Negative feedback can assume also active forms but it is usually understood as a form of saturation, resource exhaustion. Multiple interactions among the units allows for a bottom-up organization process while randomness insure robustness and prevents the self-organized system to get stuck in local minima or deadlocks. Self-organized systems show in general a well-tuned balance between exploitative (i.e. through positive feedback) and explorative (i.e. through randomness) behavior in adapting to specific external environmental conditions.
Self-organizing processes can take place on all sorts of substrates and dimensions: behavior, information, physical space, and so on. In this project, we focus on one particular form of selforganization, self-assembly, a process which involves the use of pre-existing components (separate or distinct parts of a disordered structure that can move with respect to one another) and the generation of spatial pattern and structures of interest. The components of this selfassembly process are in this case engineered (as opposed to natural), non-intelligent but still following precise interaction rules. Self-assembly at larger scales can bridge the gap between bottom-up synthesis (e.g., polymeric nanostructures or carbon nanotubes) and robotic top-down manufacturing. Self-assembling processes might be reversible or irreversible, and can be controlled by proper design of the component features and environmental characteristics (template). The emerging self-assembled structure is therefore the result of the interplay between an environmental template (a sort of centralized information) and self-organized local interactions among the components.
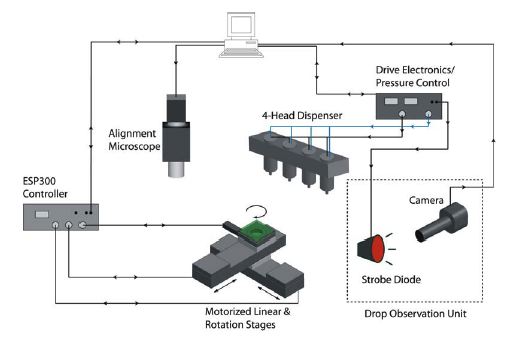
Schematic outline of the inkjet printing setup
Controlling the self-assembling process for achieving a given spatial structure (static or dynamic, if real-time control is considered) boils down to a design and control problem. Indeed, self-assembly reflects information intrinsically coded (shape, surface properties, charge, polarizability, magnetic dipole, mass, ...) in individual components; these characteristics determine the interaction rules among them. Therefore, at the component level, design is the key to application and often very little can be modified in real time at this level, at least for the components we will be using in this project. However, at the environmental level, in addition to fixed design choices such as boundaries and pre-established templates, more real-time control (and therefore additional degrees of freedom) can be exerted during manufacturing. This is particularly important to create larger scale integrated systems by self-assembly, because controllable templates can reduce defects and allow for additional control on the resulting selfassembled structure.
One choice of multi-length scale self-assembly is to design components at a given size that form a sort of building blocks for the next scale. In other words, aggregates of components at a given level can serve in turn as components for a further level of aggregates, and so on. In such cases, we could talk of a hierarchical self-assembly process. For example, ordered self-organized polymeric material can be formed on lithographical templates that can be assembled into larger aggregates having macromolecular scale precision on large surfaces.
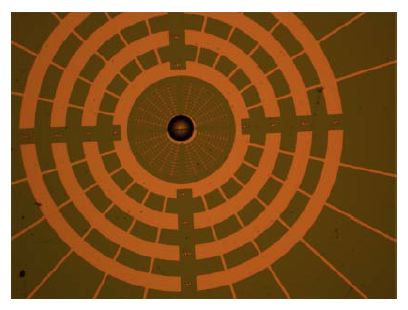
A 50 um drop inkjetted on a pre-structured target whose concentric pattern makes the drop move towards its center without any additional external active forces.
Research Goals:
Generally speaking, we are interested in the formation of ULSI-systems with hierarchical domains that scale from nm to mm scale. On one hand, we are interested in the manufacturing of real wafers and a thorough exploration of experimental fabrication methods. On the other hand, we intend to use multi-level modeling and computational techniques (see for instance [5][6][7] for application at other scales and to other platforms) in order to define a more general methodology of self-assembling at such multi-level scales, understand underlying principles, and possibly optimize cost and development time for new patterns of interest. Models will be challenged, calibrated, and validated in a continuous loop with experiments. In this project, we focus on selfassembly at the mesoscopic scale between micrometer and sub-mm scale, but the scaling of the methodology will be considered. The patterns at this length scale have a high potential for technological applications. Moreover, they can still be fabricated using lithographic techniques and observed under optical microscopes endowed with video recording equipment for dynamic processes.
A microfluidic environment will be used for the self-assembly of components at the micrometer scale to overcome mobility limitations of the individual pieces induced by surface stiction, eventually combined with microfluidic networks. Real-time observation (and hence interfacing to computer vision, control, and feedback) at this scale can be done by microscopic observation. For components below 1 micrometer, an environmental scanning electron microscope (E-SEM) and/or AFM under liquid are needed. Both equipments are currently not available at EPFL but are considered crucial for a variety of research in micro/nanosystems. Hence, this project could initiate a future joint request for EPFL to purchase such equipment in order to be able to extend the study of self-assembly into the sub-micron domain.
Our specific objectives are:
- Create a simple analytical model of the surface wetting of droplets on micro-structured surfaces.
- Fabricate test structures in clean room and perform self-aligned drop-on-demand droplet dispensing.
- Elaborate multi-level model for single and multi-droplet systems, calibrated on previous experiments, and propose a new optimized design for surface conditions and micro-pattern geometry.
- Create a second generation of surface structures to validate the model.
Research Collaboration:
This project is a truly interdisciplinary one, requiring the combined expertise in micro and nanoengineering, control/robotics, and computer science. It could lead to the development of revolutionary manufacturing methods and applications in micro- and nano-electronics (e.g. MEMS/NEMS, displays, photonic crystals, CNT networks) and robotics (both manipulators but also mobile ultra-small robots). The two groups involved in this project are:
Microsystems Laboratory 1 (LMIS1 - Prof. Jürgen Brugger)
Swarm - Intelligent Systems Group (Prof. Alcherio Martinoli)