
Go to
Generic Scavenger Powered SoC
Generic Scavenger Powered DSP-Based System-on-Chip for Emerging Implantable Biosensors and Bioactuators
Overview:
As more biomedical equipment devices exploit ultra-low-power mixed-signal design innovations, the variety of medical semiconductor applications continues to expand. The ability to combine analog and digital signals in very close proximity alongside wireless communications has led to the development of new implantable medical devices.
Implantable devices have a number of fundamental design requirements. They must feature a long and relatively maintenance-free life due to the cost and complications of explantation and the serious implications of malfunctions or failure. In addition, they must have ultra-low power consumption, and the battery life must be as long as possible (typically more than 10 years for some devices). Power consumption determines the life of the implant. It also figures the size of the battery, often the largest component in an application where the absolute minimum size achievable is critical.
The present project proposition addresses these aspects and aims at specifying and demonstrating a generic DSP-based SoC where the power supply is supplemented by a vibration-based energy scavenging MEMS and dedicated to implantable medical devices. The SoC will feature all requirements inherent to implantable medical devices, i.e. high reliability and high integration design, ultra low power consumption, wireless capabilities taking into account ethical and privacy issues, DSP functions and rich set of integrated peripherals to control the biosensors and bioactuators efficiently.
First available solutions for DSP and RF units will be integrated. The targeted application envisioned to validate the concept is the implantable glucose sensor under development at LPM. The scavenger and the SoC will respectively power and control this sensor.
Viscosity
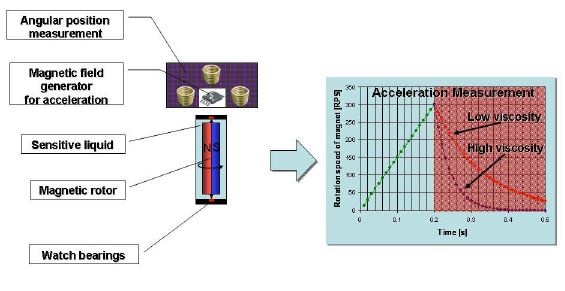
The measurement process consists in accelerating the rotating part of the rheometer (the magnet) up to a given frequency Vmax by the means of an external and contactless rotating magnetic field generator. The instant decoupling of the magnetic field from rotating part leads to a freely evolving system. Since the rotor is immersed in a liquid (the sensitive solution) the rotation frequency will decrease due to viscous environment. Therefore the viscosity can be determined by measuring the damping factor between two rotation frequencies Vmax and Vmin.
Research Goals:
The scientific and technological objectives of this project are manifold. The first objective is to specify a generic SoC satisfying the medical implantable device requirements including emerging biosensors and actual medical devices requirements.
Then will follow a preliminary design of the generic SoC jointly to power management circuitry including scavenger aspects. At this time, a power management strategy will be investigated. The goal is first to assess SoC performance in term of quality of communication (BER, distance and antenna efficiency) and second to estimate the power consumption.
Once the SoC is validated, the design of analog and digital front ends specific to the implantable glucose sensor will begin. This stage will concern on the one hand hardware (interconnection of various chips on a same substrate through peripherals provided by DSP) and on the other hand software i.e. sensor control (communication and power management, rotating magnetic field generation and real time computation in fixed-point of viscosity by exploiting DSP special features).
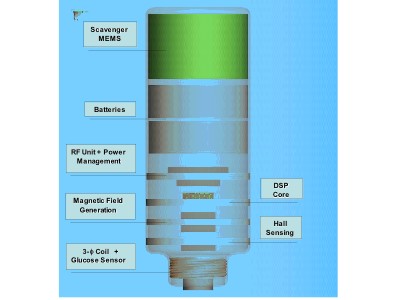
At each stage, packaging aspects will be considered as most of the chips can be obtained as dies (DSP and RF unit especially). The integration aims at reaching the absolute minimum size achievable and an example of packaging for the glucose sensor including its specific analog and digital front-ends is shown hereafter.
Other complicating matters to be studied here are the tiny antennas used in implanted devices that are inefficient and that usually require extra power to compensate. MICS antennas must be very small, low-profile, and long term biocompatible. Microstrip antennas are often mounted on the implant itself and use the case as the ground plane. In addition, the human body is a good attenuator of an electromagnetic signal. Various studies have shown that the layers of fat, muscle, skin, and bone all have different dielectric properties that the electromagnetic signal must overcome.
Fortunately, implant transmissions are infrequent (typically the glucose sensor will perform a glycaemia measurement up to every 5 minutes or 12 times per hour), so MICS-band transceivers squeeze power savings by turning off as many circuits as possible. Furthermore, the transmission range need only to be long enough to deliver a message to a receiver located in the same room as the patient or worn by the patient. The smaller the transmission range and slower the data can be sent, the lower the power consumption.
Research Collaborators:
This research project will be conducted in close collaboration among the following four research groups:
Microengineering Production Laboratory (LPM - Eric Meurville/Léandre Bolomey/Giancarlo Corradini): Specification, design, integration, packaging and validation of the generic SoC through the implantable glucose sensor application.
Microelectronic Systems Laboratory (LSM - Prof. Yusuf Leblebici): Contribution to design of analog and digital front-ends (sensor/actuator interfaces) and power management system.
Integrated Systems Laboratory (LSI - Prof. Giovanni DeMicheli/Alexandru Susu/Prof. Andrea Acquaviva): Dimensioning, design and experimentation of the vibration-based scavenging system.
Centre Suisse d'Electronique et de Microtechnique SA (CSEM - Prof. Christian Piguet): Provider of the DSP core as well as support on development tools and on power management strategy.